 |
Distributed Networked Control
In this research we present necessary and sufficient conditions for several forms of controlled system reliability.
For comparison purposes, past results on the reliability analysis of controlled systems are reviewed and several of
the past results are shown to be either conservative or have exponential complexity. For systems with real and complex uncertainties,
conditions for robust reliable stability and performance are formulated in terms of the structured singular values of certain transfer functions.
The conditions are necessary and sufficient for the controller to stabilize the closed-loop system
while retaining a desirable level of the closed-loop performance in the presence of actuator/sensor faults or failures,
as well as plant-model mismatches. The resulting conditions based on the structured singular value are applied to
the decentralized control for a high-purity distillation column and singular value decomposition-based optimal control
for a parallel reactor with combined precooling. Tight polynomial-time bounds for the conditions can be evaluated by using available off-the-shelf software.
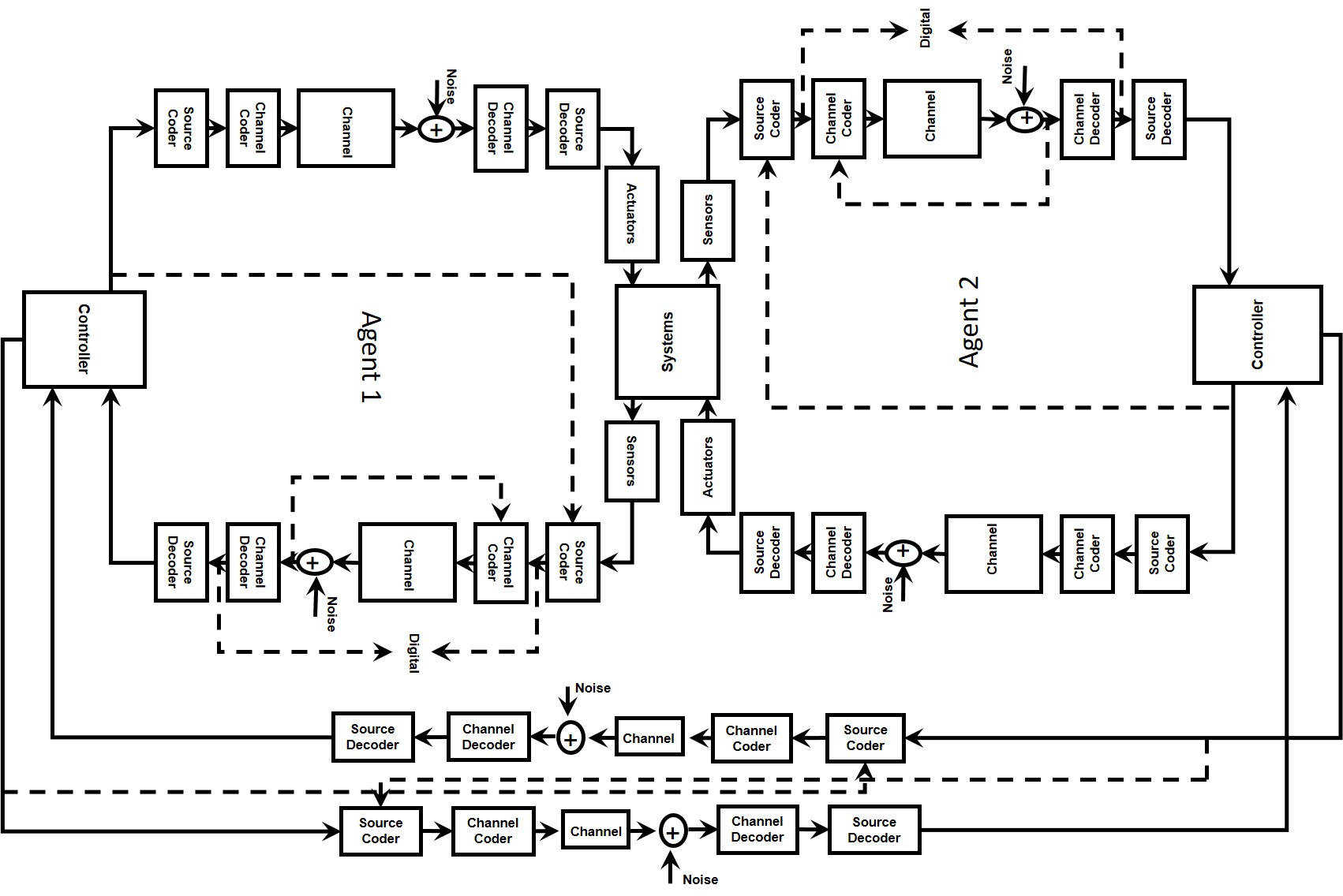 |
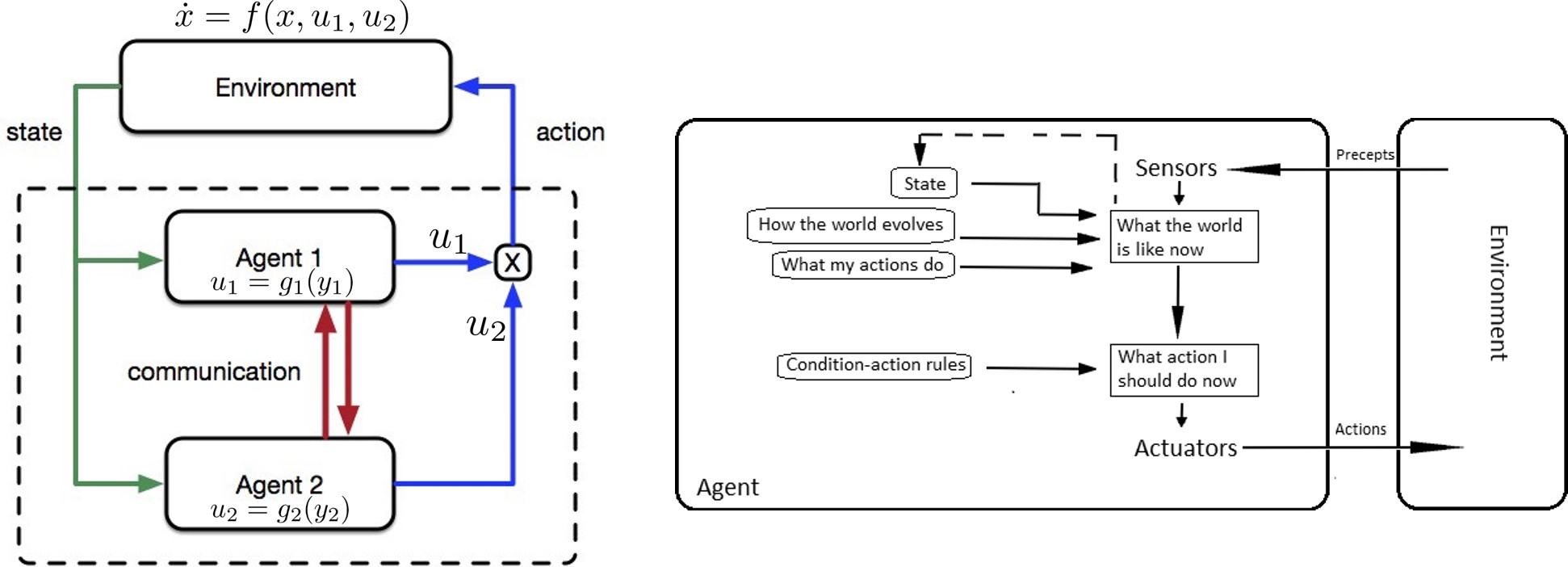
Simultaneous Design of Distributed Control and Communication Architectures
The development of communication systems and networking technologies is rapidly gaining importance in information control applications
such as autonomous navigation, connected cars, multiple robots, and satellite control. The open problems
that are important in the study of control systems in which multiple sensors or actuators are distributed in a networked environment
in a temporally and spatially distributed manner can be summarized as follows:
How information interacts with the system control and how the value of information can be quantified in achieving system performance goals through feedback control.
The engineering problem to be solved by this study is to investigate the problems mentioned above by expanding to a case
where a plurality of controllers share information through communication. Conceptually, we will address the following issues:
(1) how local information and optimization control interact with temporally and spatially distributed agents;
(2) how the value of information exchange can be quantified if agents can exchange local information over
a communication network with constraints (time-delay, packet-drop, limited bandwidth, etc.).
In solving these problems, competitive agents or cooperative agents should be determined first,
and information exchange is required to be strategically performed to maximize the achievement of performance goals of each agent.
Subordinate problems include research on partial-ordering mathematical information structures that multiple agents are informed about system state,
information exchange methods to maximize control performance in case of collaborative control.
 |
Distributed Coordination with Limited Information
This research is in the area of distributed coordination under limited information.
The particular problem we are investigating is two-sided sequential hypothesis testing.
In the classical one-sided problem, an agent seeks to make a declaration about an unknown, but fixed, state of the world.
At each stage, the agent must make a payment to take a measurement that is correlated to the unknown state.
At any time, the agent may choose to make a declaration about the state of the world and receive a reward if correct or penalty if incorrect.
At that point, the game is over and no further measurements are taken. In the two sided version, there are two agents that have no communication with each other.
As before, they are taking costly measurements, and each agent can make a declaration about the state of the world.
Unlike before, the game continues until both agents have made declarations.
Furthermore, they resulting penalty or reward depends additional on the temporal coordination of their declarations.
For example, even if both agents make correct declarations, they are penalized if their declarations are far apart in time.
The difficulty is that an agent is not informed whether or not the other agent has already made a declaration.
Our specific contribution has been to explore this setting by constructing optimal policies in a leader follower setting,
i.e., given a declaration policy of the one of the agents, what is the other agent's optimal best response.
This setting is motivated by game theoretic coordination problems in which agents must coordinate a decision given partial information (e.g., in global games).
The main contribution here is to bring in a temporal aspect.
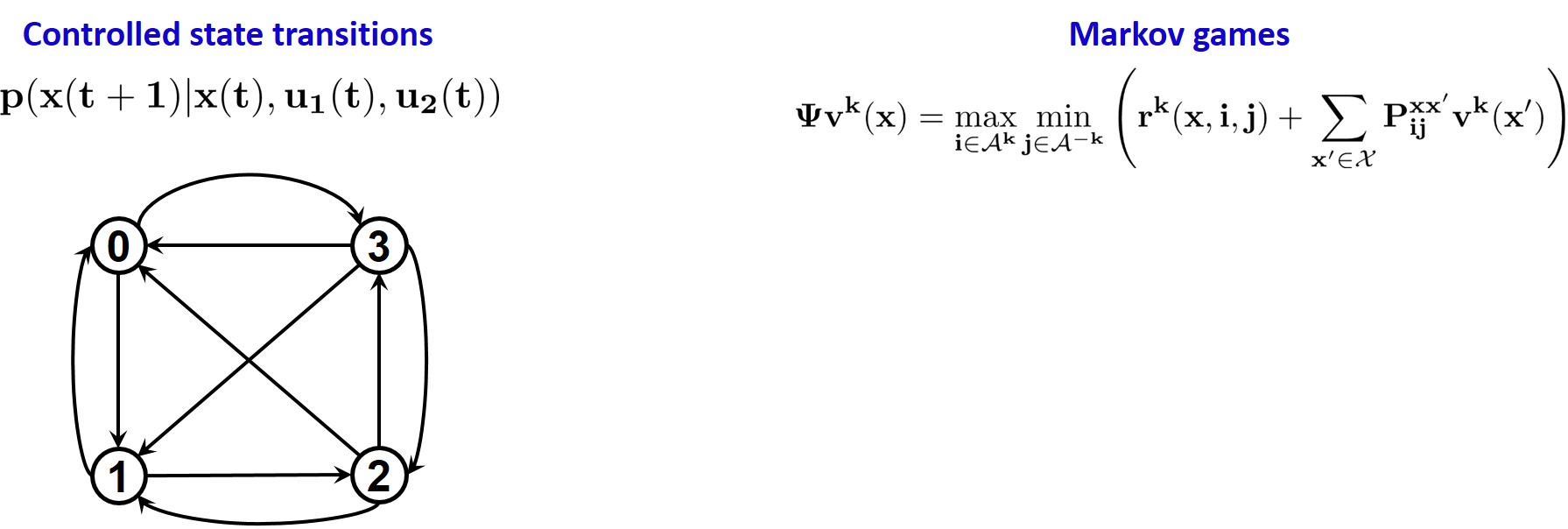 |
Stochastic Games with Incomplete Information
In this research we consider situations described as stochastic or Markov games in which the state is not known to all the players.
This is in fact a special case of a much more general class of games where both informational and stochastic features are present.
We introduce a collection of partial results including the models deal with two-person zero-sum games with lack of information on one side and standard signaling.
Structural properties related to the recursive structure are be studied, and then asymptotic aspects are investigated.
We aim at presenting some fundamental differences with classical stochastic games: nonexistence of the value, and non-algebraicity of the minmax, maxmin or lim vn.
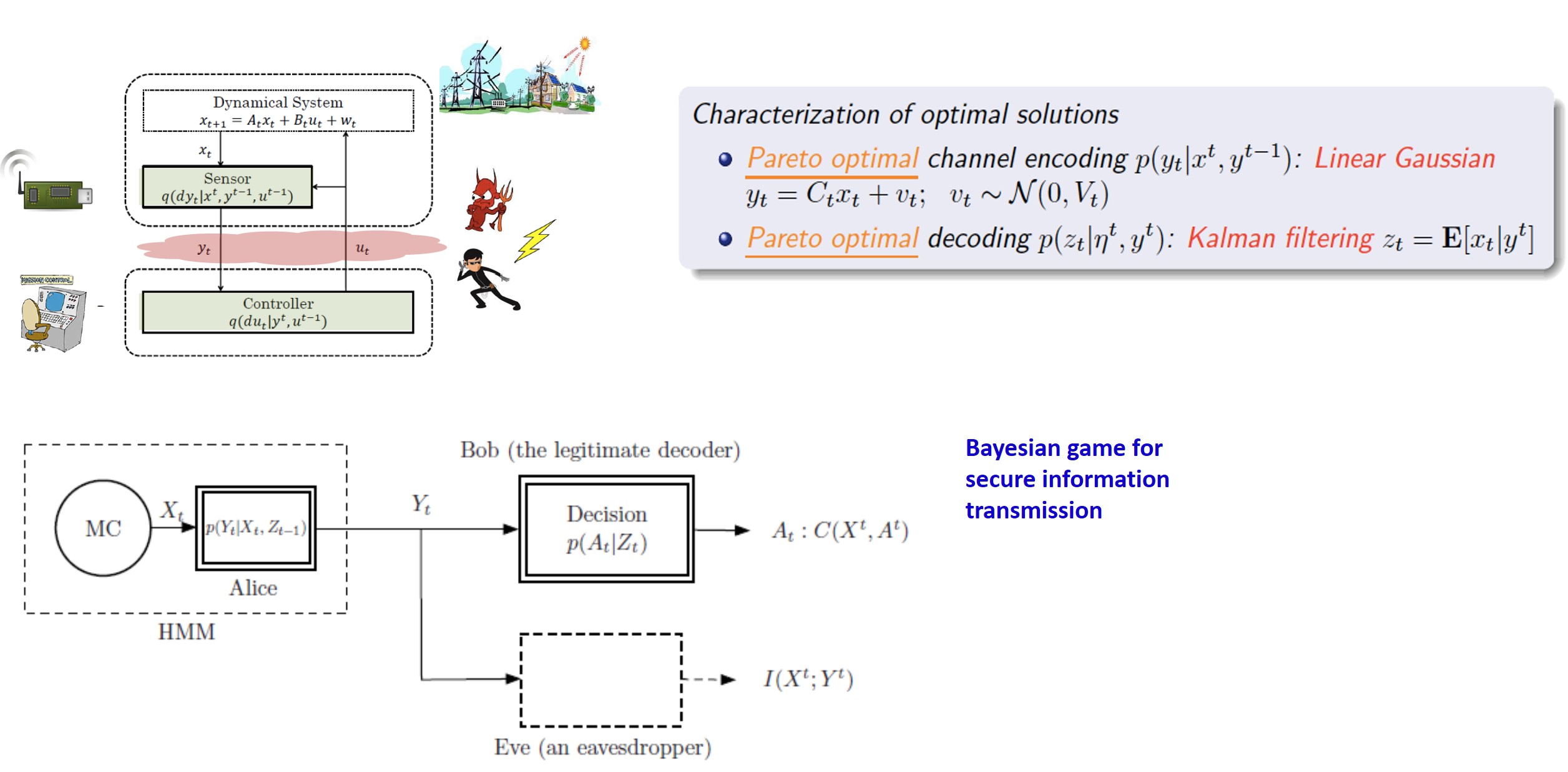 |
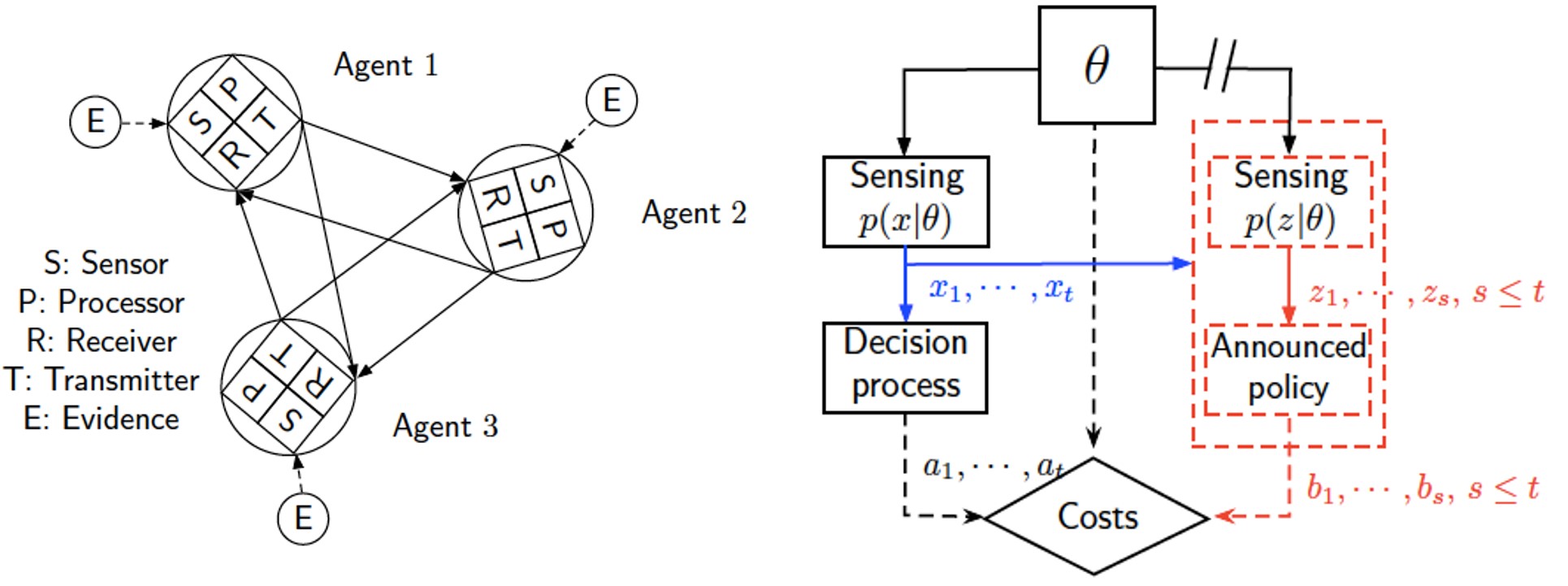
Strategic Information Transmission
This research analyzes the information disclosure and exchange problems originated in economics in conjunction with information theory.
This class of problems are significantly different from the classical communication problems in information theory
in that sense that the encoder and the decoder are both strategic and have different objectives, and, more importantly,
they are aware of such possibly conflicting mismatches and act accordingly.
In our setting, this problem is formulated as a hierarchical communication game
in which the transmitter announces an encoding strategy with full commitment and
its distortion measure is computed with a private information sequence whose realization is available at the transmitter side only.
The receiver determines its decoding strategy that minimizes its own distortion in the response to the announced encoding strategy of the transmitter
and the known statistics of private information available to the transmitter. Three problem settings are considered,
focusing on the quadratic distortion measures, and jointly Gaussian source and private information: compression, communication,
and the simple equilibrium conditions without any compression or communication.
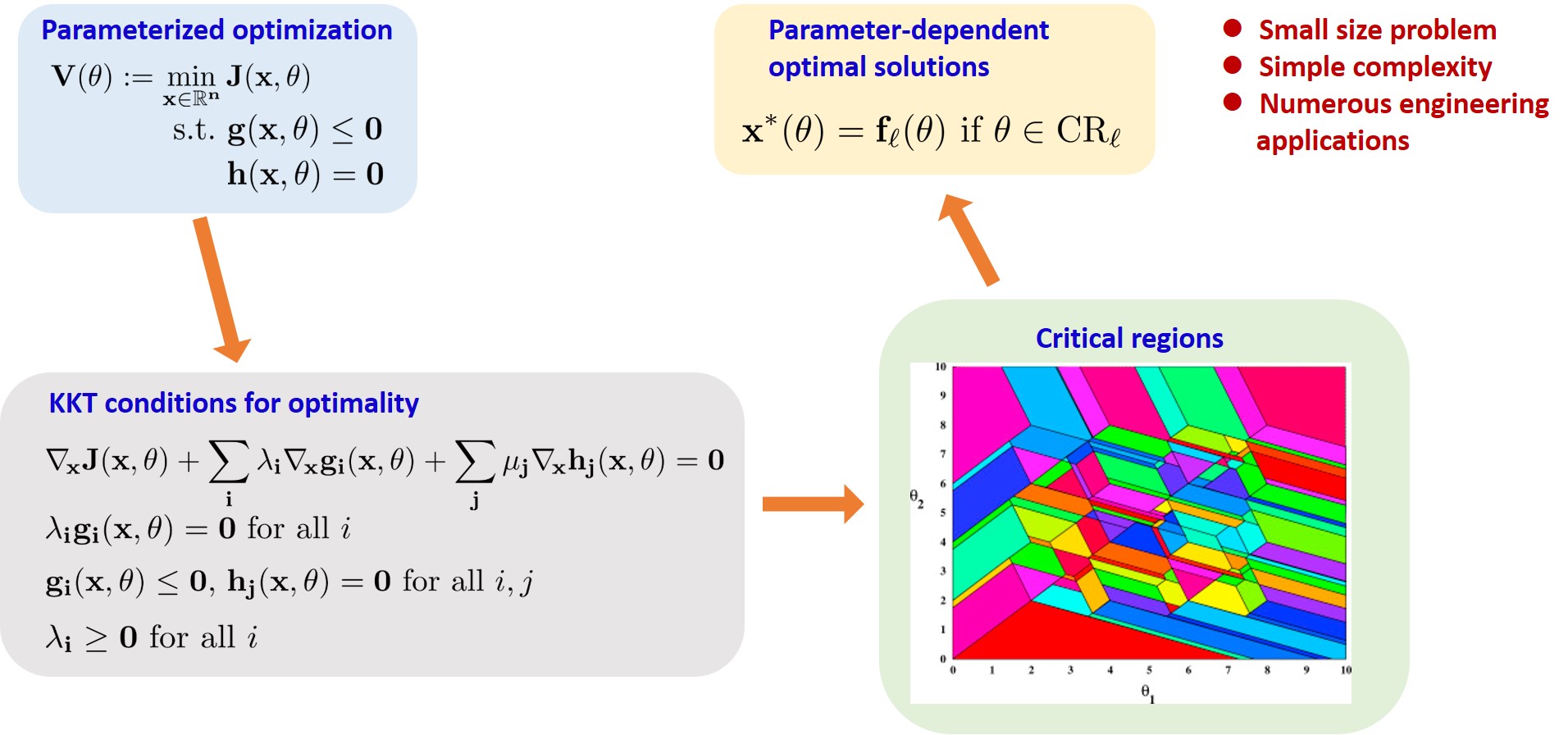 |
Multi-parametric Programming and Approximate Dynamic Programming
This research studies a new algorithm for multi-stage decision problems with hard constraints.
The algorithm is based upon the concepts of dynamic programming and multi-parametric programming.
The multi-stage problem is considered within a framework of dynamic programming where each echelon of problem
is formulated and solved as a multi-parametric program. The state-space of a given stage constitutes the parametric space
whereas the state-space of the next stage represents the space of control or manipulating variables.
The solution of the resulting multi-parametric program is given by the control or the manipulating variables
as a set of explicit functions of the parameters. The dynamic recursive nature of the multi-stage problem is preserved
and a set of sequential and simpler multi-parametric programs which are constrained by a reduced number of inequalities is obtained.
This results in a reduction in the complexity of the overall problem.
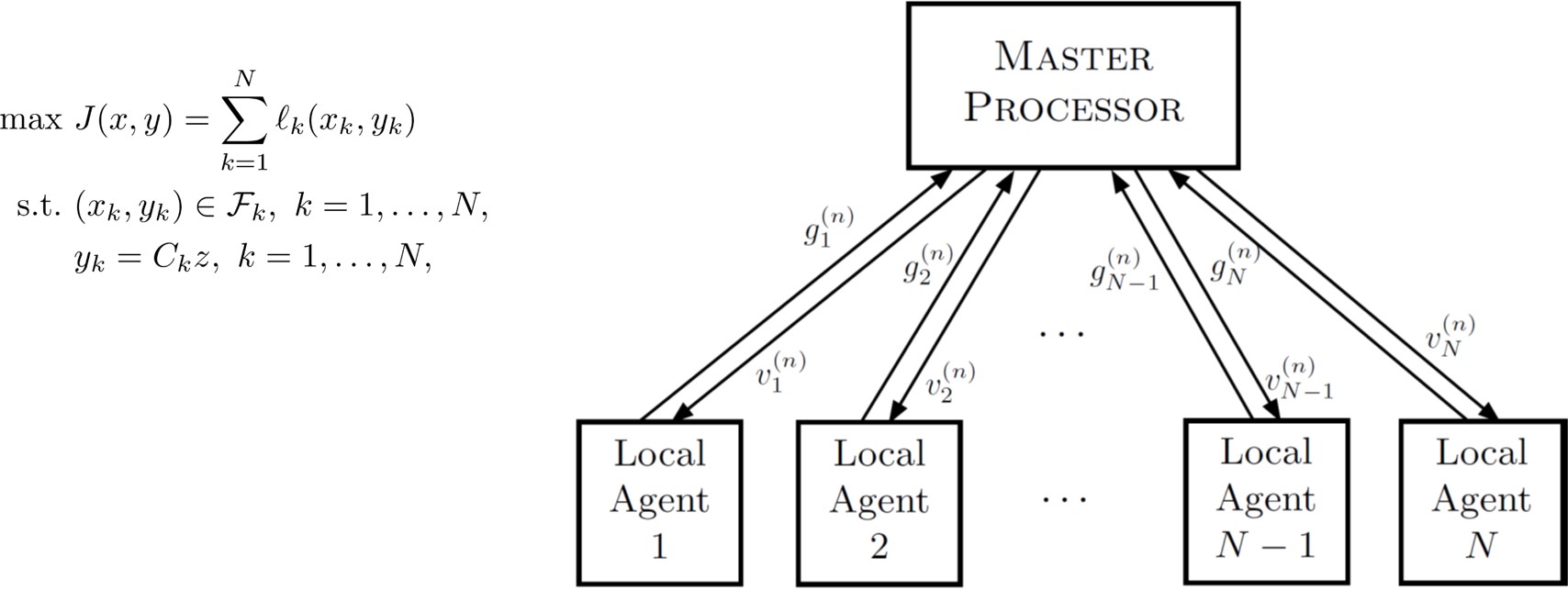 |
Convex Relaxation for Suboptimal Belief Propagation
This research develops methods of distributed Bayesian hypothesis tests for fault detection and diagnosis that are based on belief propagation and optimization in graphical models.
The main challenges in developing distributed statistical estimation algorithms are
i) difficulties in ensuring convergence and consensus for solutions of distributed inference problems,
ii) increasing computational costs due to lack of scalability,
and
iii) communication constraints for networked multi-agent systems.
To cope with those challenges, this manuscript considers
i) belief propagation and optimization in graphical models of complex distributed systems,
ii) decomposition methods of optimization for parallel and iterative computations,
and
iii) distributed decision-making protocols.
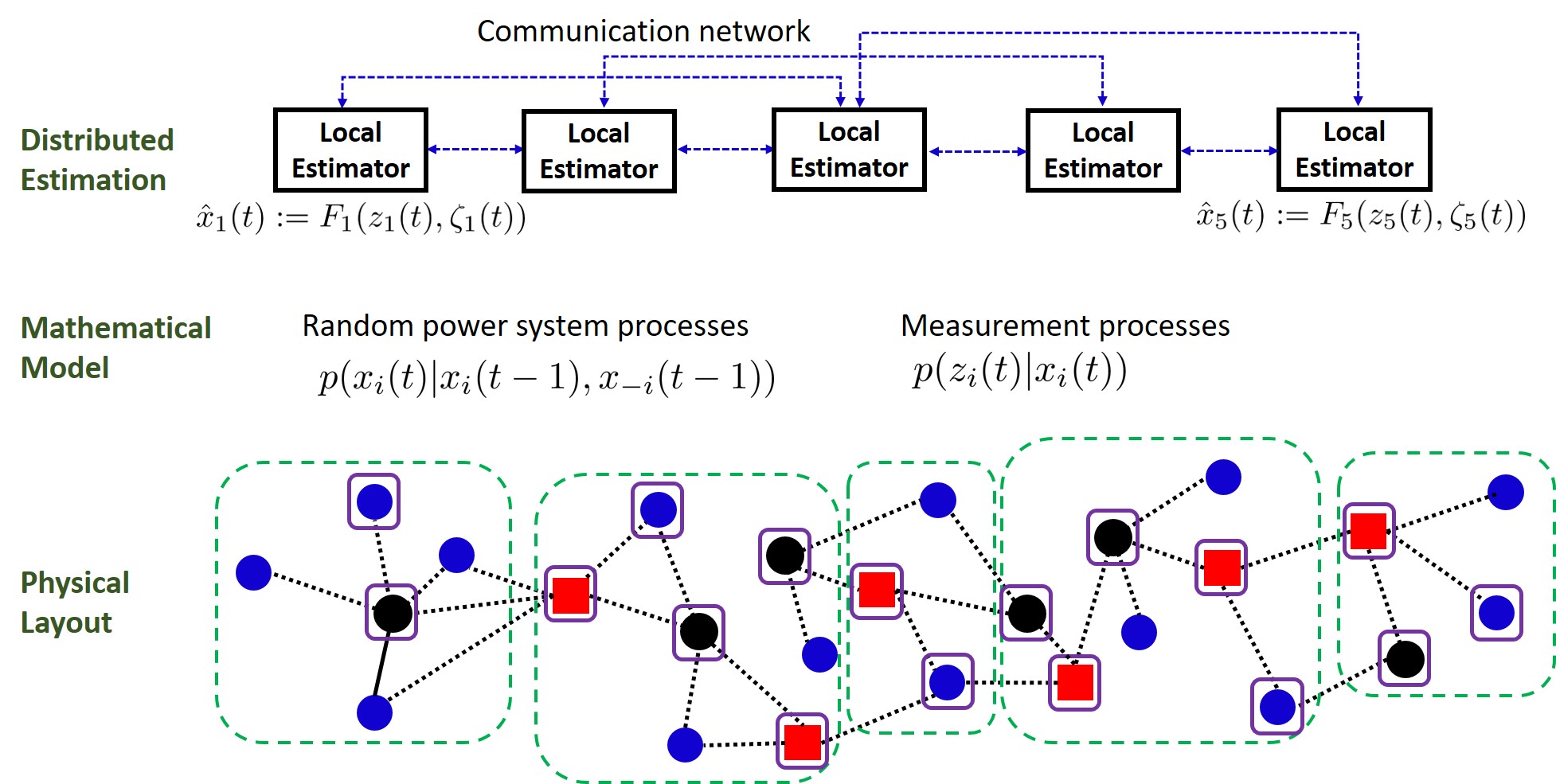 |
Distributed Bayesian Filtering for Large-scale Power System State Estimation
In this research we propose a fully distributed state estimation method for the electric power grid using multi-agent maximum a posteriori probability estimate.
Under the proposed distributed estimation algorithm for multiple estimators, each estimator relies only on local measurement data and information exchange with neighboring estimators.
Estimators iteratively compute maximum a posteriori probability (MAP) estimate for given local measurements and
the neighbors' MAP estimates at the previous iteration stage. This method reduces communication burdens and
enables resilient state estimation in the presence of bad measurement data and parametric uncertainty in system models.
The state estimation with the proposed distributed MAP iteration formulae is guaranteed to exponentially converge to the centralized optimal estimate.
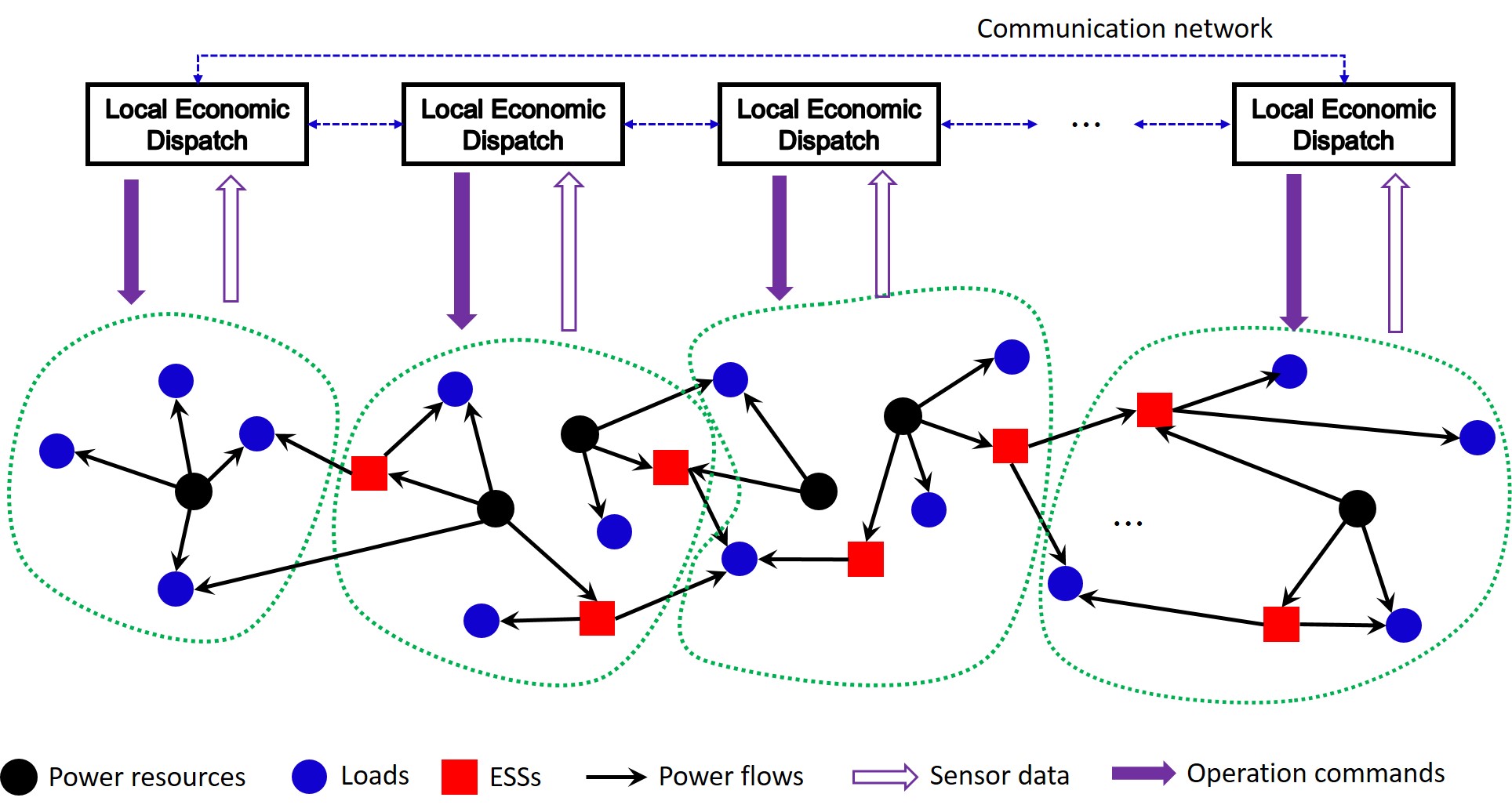 |
Distributed Dynamic Economic Dispatch
In this research we propose a fully distributed online resource allocation algorithm for economic power dispatch with distributed generators, storages, and loads.
The problem of distributed economic power dispatch is considered as an application of multi-agent learning (MAL).
Each agent corresponding to a bus in a power network performs the learning on the basis of local information only without access to the global states of the power network.
We show that the learning dynamics converges to an equilibrium and analyze under which conditions of the power network topology such equilibrium is efficient.
 |
Distributed Optimal Power Flow for Smart Microgrids
Energy management in microgrids is typically formulated as a nonlinear optimization problem.
Solving such nonlinear programs in a centralized manner does not only require high computational capabilities at the microgrid central controller (MGCC)
but also can infringe privacy of customers. Existing distributed approaches for microgrid energy management
assume that all generations and loads are connected to one bus and ignore the underlying power distribution network and
the associated power flow and system operational constraints. Consequently, the schedules produced
by those algorithms may violate those constraints and thus are not feasible in practice.
Therefore, the focus of this paper is on the design of a distributed energy management strategy (EMS)
for the optimal operation of microgrids with consideration of the distribution network and the associated constraints.
In this research we formulate the microgrid energy management problem as an optimal power flow problem and
propose a distributed EMS where the MGCC and the local controllers jointly compute an optimal schedule of power flow.
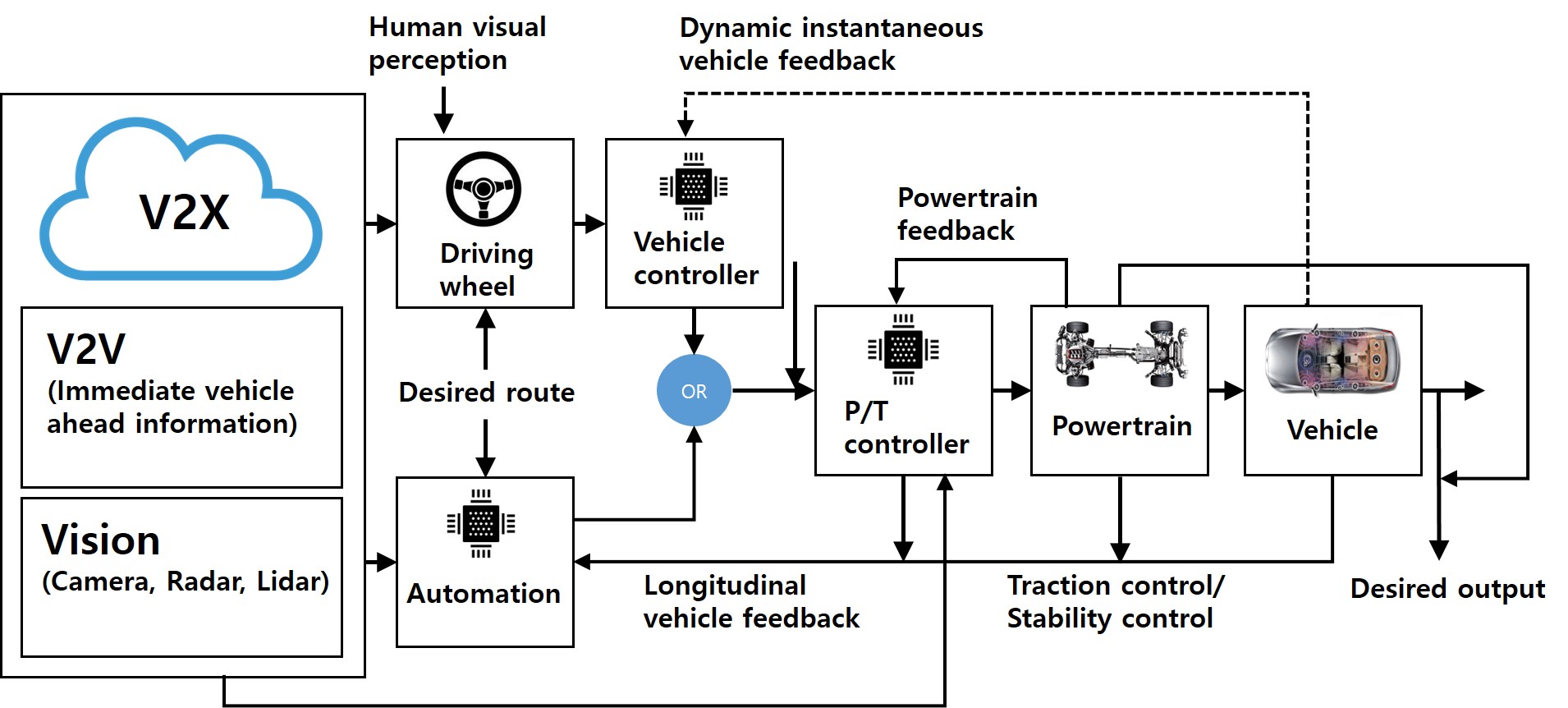 |
Fault-tolerant Model Predictive Control for Power Management of HEVs
The main objective of this project is to develop a novel fault-tolerant model predictive control (FTMPC) that employs its internal model to detect, isolate, and compensate for faults.
This approach takes advantage of several opportunities in power management of hybrid electric vehicles (HEVs):
(1) real-time process monitoring systems have become increasingly implemented and accepted in vehicle control including autonomous driving, energy management, etc.,
(2) MPC algorithms as well as associated built-in methods for constructing its internal models from vehicle data have become increasingly implemented and accepted,
(3) the optimization-based approach underlying MPC provides enough flexibility that constraints, safety, environment,
and economics can be incorporated into the determination of control actions, and
(4) the repeated on-line computation feature of MPC enables the control actions to accommodate to changing process models or operating conditions.
The time is ripe for the development of MPC algorithms that make best utilization of the information provided by process monitoring systems,
to contribute to an inherently more reliable next generation in model predictive control for power management of HEVs.
FTMPC will detect faults by comparing the predictions made by the internal model in MPC with measurements obtained from the plant.
An advantage of this approach is that, by utilizing its internal model as a basis for process monitoring, no existing process monitoring system has to be in place.
Output estimation methods will be employed that utilize linear transformations of the residuals to identify the probable type and location of the faults.
FTMPC will take into account the extent that feedback could be masking the effect of faults on the transformed residuals.
A longer term goal of the group's research beyond the project funding is the development of the next generation of model predictive control.
Other activities in the group include the explicit incorporation of the effects of model uncertainties and nonlinearities into MPC algorithms,
and a long term goal is to develop MPC algorithms that can determine optimal control actions while simultaneously taking into account faults, model uncertainties, and nonlinearities.
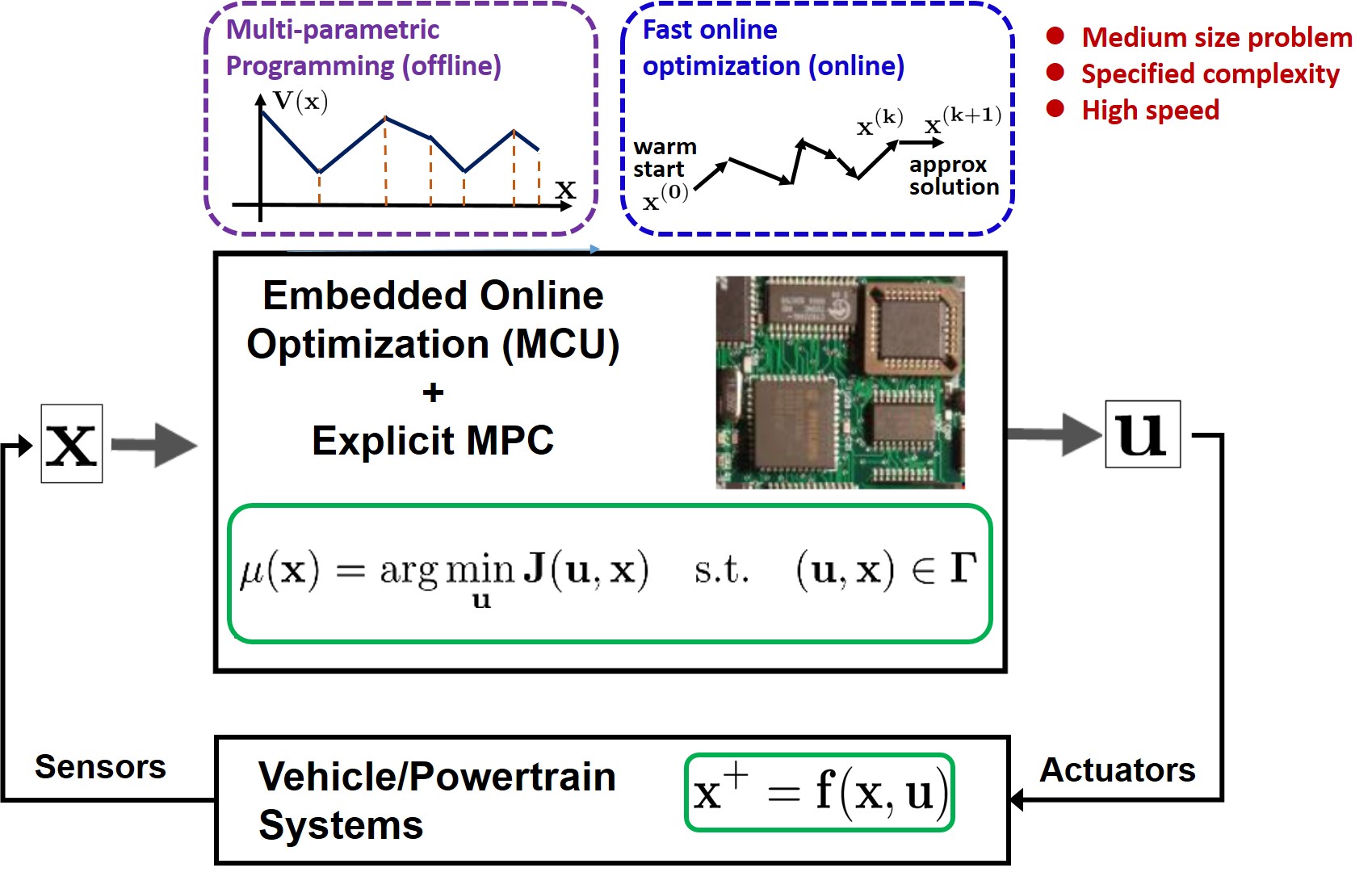 |
Embedded MPC for Power Management of HEVs
Presence of an alternative energy source along with the internal combustion engine in hybrid electric vehicles (HEVs) appeals for
optimal power management between engine and battery for minimizing fuel consumption and optimizing power utilization.
The main objective of this project is to develop a novel embedded model predictive control (EMPC) that employs multi-parametric programming (MPP)
and accelerated online optimization methods such as fast gradient and fast interior-point methods.
Complex nonlinear vehicle dynamics and powertrain equations are reduced to smaller-size control-oriented models
with which the optimization-based control law is designed while satisfying the operational constraints.
The main challenges are to deal with infeasibility of constraints and stability of the closed-loop systems, as well as to guarantee real-time performance of the embedded MPC.
The MPC algorithm we develop integrates explicit MPC solutions and online optimization methods.
Explicit MPC solutions are computed offline and used to approximate the associated value function.
This approximate value function is used to compute an approximate dynamic programming solution
for which only one-step look ahead small-size problem needs to be solved online.
An advantage of this approach is that, by utilizing the offline pre-computed value function,
the computational complexity of online optimization can be significantly reduced and it enables the real-time performance of embedded MPC.
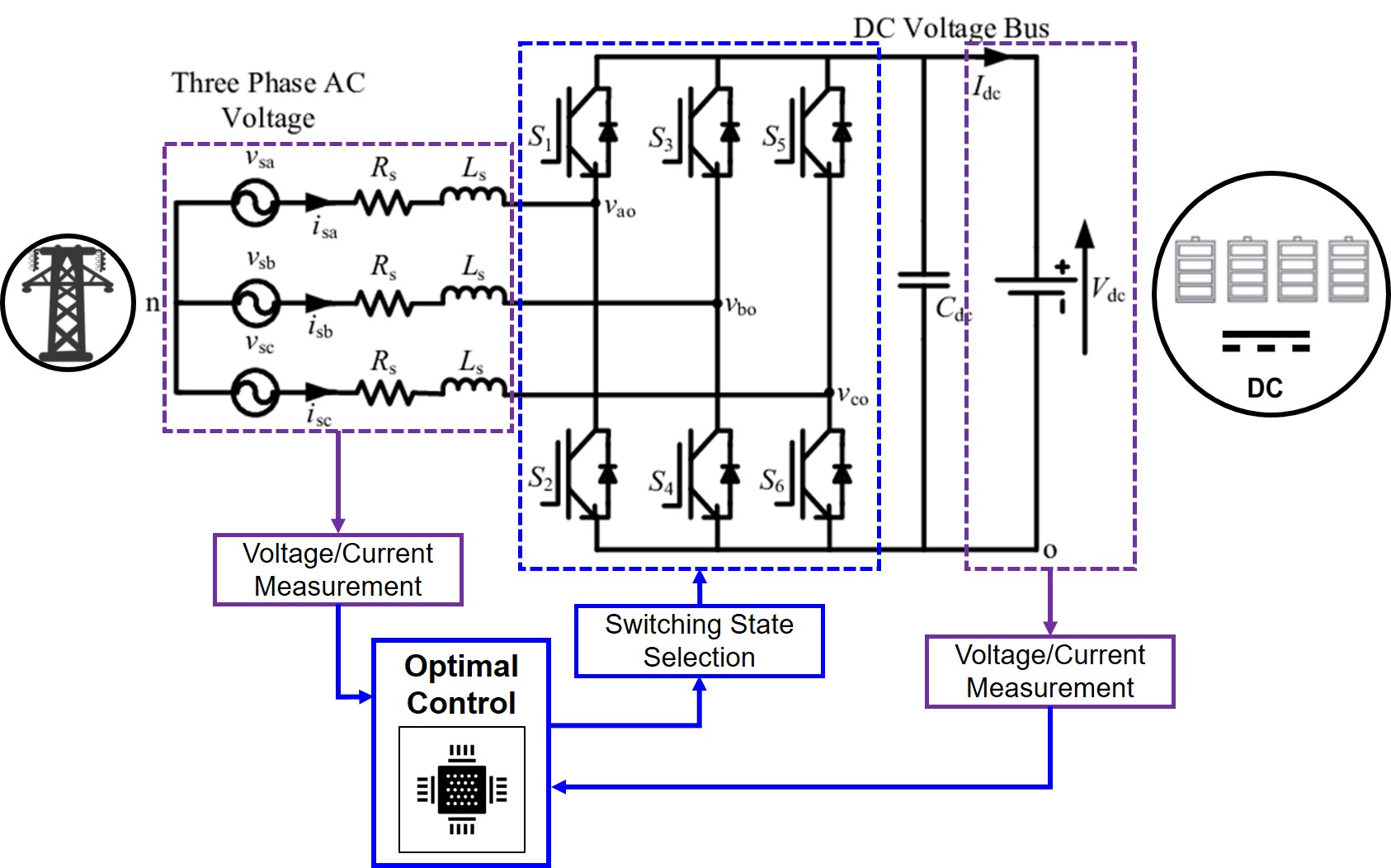 |
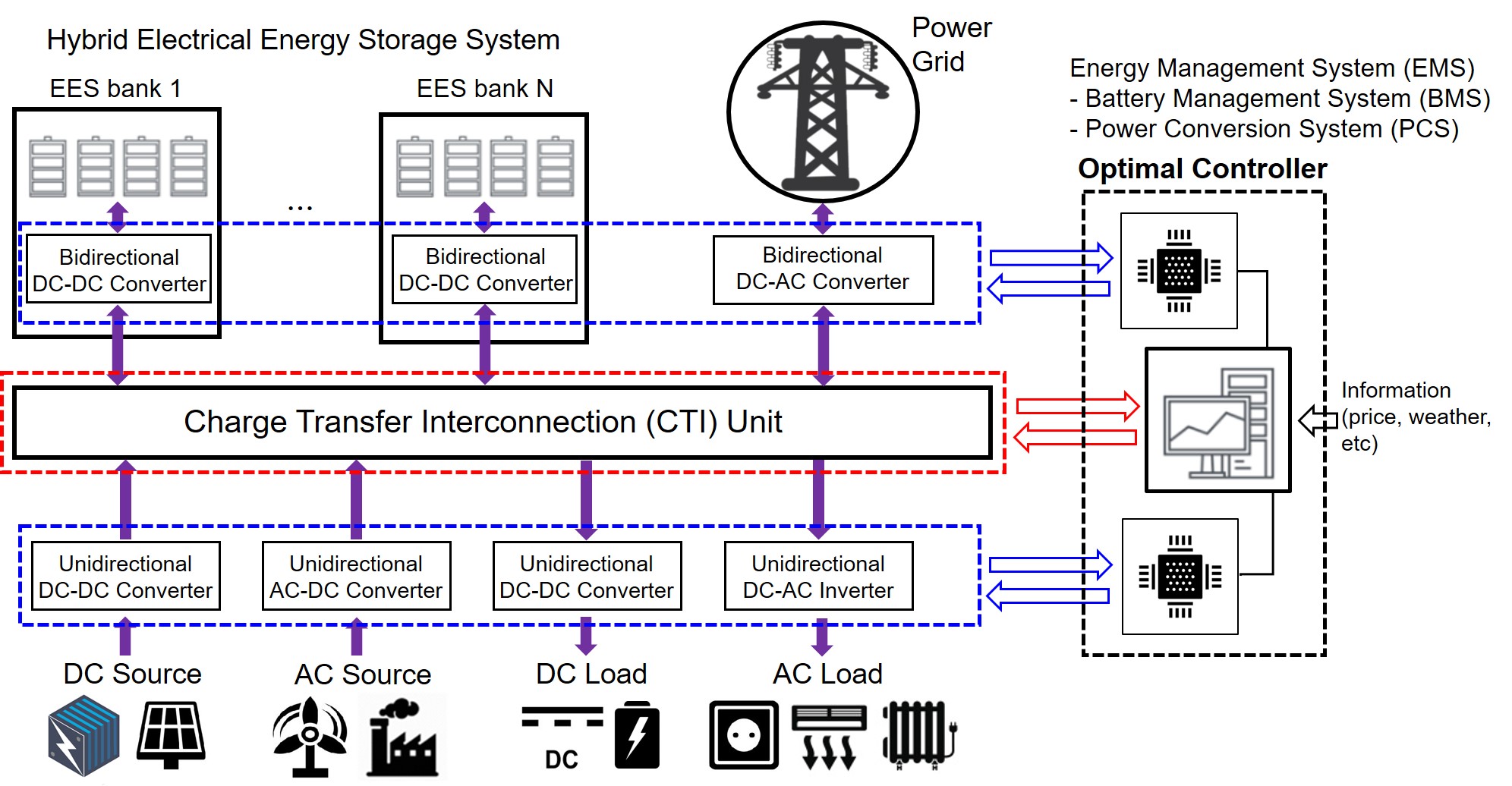
Optimal Control of Bidirectional Power Converters
Development of bi-directional power conversion control system technology based on renewable energy such as photovoltaic power generation and wind power generation
requires efficient energy balance control technology in accordance with changes in energy supply sources, load conditions,
and user-required power demands for stable power supply. To achieve this, we develop an optimal charge/discharge control algorithm
and an optimal charge transfer scheduling algorithm for stable power flows between the distributed power source and the consumers
as well as designing battery devices with excellent instantaneous characteristics.
In order to develop bi-directional grid-connected power conversion system technology to realize this, mathematical modeling of power conversion device
and development of optimal power conversion control are key technologies for stable power supply in next-generation of smart power grid.
Bi-directional AC-to-DC converters require bi-directional power flow, grid synchronization,
and DC power management capabilities to develop related technologies as an integral part of energy storage systems.
The control algorithm of this AC-DC converter should avoid the problem of power quality deterioration due to high total harmonic distortion,
low power factor, AC voltage distortion and DC current and voltage ripple. To solve such problems,
we employ nonlinear optimal control techniques to develop optimal control on the basis of Pontryagin maximum principle, model predictive control, and Lyapunov methods.
|

